
Macchine e mani: immagini, immaginazione, creazione
La scienza e la tecnologia delle interfacce aptiche
La nostra pelle contiene un numero enorme di recettori tattili, decine di milioni, che ne fanno un sensibilissimo organo, esteso per circa 1,8 metri quadrati nell’adulto, e capace di registrare qualunque contatto con il mondo. Vi sono recettori di molti tipi diversi, che ci comunicano se qualcosa è caldo, morbido, liscio, appuntito, doloroso e così via.
La pelle riceve questi stimoli dal mondo esterno continuamente, eppure per la maggior parte del tempo non diamo loro attenzione.
L’assuefazione a uno stimolo tattile è molto veloce: così ad esempio, quando indossiamo un capo di abbigliamento, dopo una prima sensazione sulla sua morbidezza o la trama delle fibre, non ce ne curiamo più.
Il tatto, infatti, è un senso dinamico per eccellenza, che sente fortemente le variazioni degli stimoli e il divenire del nostro rapporto con l’ambiente, più che fornirci un’immagine statica di come l’ambiente è in un dato momento.
Mediante il tatto percepiamo emozioni e stimoli, piacevoli come le carezze per un bambino, o preoccupanti come i segnali di contatto con un potenziale pericolo. Per questo il tatto è profondamente legato alla parte emozionale del nostro sistema nervoso. Ma il tatto è anche importantissimo per le nostre capacità cognitive superiori, vale a dire per conoscere e per fare.

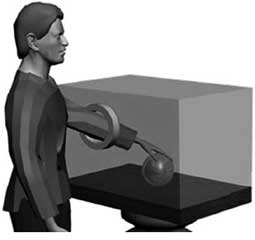
Una interfaccia aptica commerciale: il Phantom della Sensable Inc.
Il carattere dinamico della percezione tattile fa sì che, quando la usiamo per conoscere il mondo che ci circonda, lo facciamo esplorando attivamente gli oggetti che lo compongono.
La differenza con sensi quali l’odorato, il gusto o l’udito - che sono come finestre aperte sul mondo attraverso cui riceviamo stimoli in modo quasi totalmente passivo - è enorme. Anche la vista, la quale pure si avvale di varie e importanti funzioni attive, come la direzione dello sguardo e la messa a fuoco, è meno legata alle strutture senso-motorie del nostro organismo e alla interazione con l’ambiente.
Nel formare quella che si può pensare come l’equivalente di un’immagine per il tatto, l’uomo quindi tocca, sfiora, tasta, segue, preme l’oggetto della sua indagine: nel far questo, usa prevalentemente la sua mano.
La mano, con l’acutissima sensibilità di decine di migliaia di recettori tattili nella sua pelle, ma anche con la sua destrezza nell’esplorazione e nel controllo del contatto, è da considerarsi come il vero organo del tatto, per quel che riguarda le funzioni cognitive superiori.
La tecnologia del secolo scorso ha reso possibile creare stimoli artificiali del tutto convincenti per alcuni sensi: si pensi all’alta fedeltà della riproduzione audio, o all’alta definizione degli schermi televisivi e della grafica computerizzata dei videogiochi più moderni.
È possibile pensare a qualcosa di analogo per il tatto, cioè a ricreare artificialmente ma realisticamente delle immagini per mani?
Ve ne sarebbero applicazioni molto utili, ad esempio per l’interazione tra l’uomo e il computer.
Per quanto detto, infatti, è naturale pensare al tatto come a un ingrediente fondamentale di qualsiasi sistema di realtà virtuale che cerchi di fornire sensazioni convincenti d’immersione, di essere presenti in ambienti in cui non lo siamo realmente - sia questo sistema pensato per l’addestramento di un chirurgo, per simulare la guida di un veicolo, per l’intrattenimento o altro.
Le tecniche di realtà virtuale attuali, peraltro, si basano ancora prevalentemente sul solo senso della visione creando immagini su display ottici, che oggi raggiungono risoluzioni altissime e un realismo quasi fotografico con un’ottima resa tridimensionale.
Solo con l’integrazione d’altre modalità sensoriali, in particolare tattili, sarà possibile per questi sistemi fare un balzo in avanti - permettendo così di passare dalla esperienza di essere presenti in un ambiente virtuale, a quella di entrare in contatto con quell’ambiente.
Come creare dunque dispositivi che permettano di generare per le nostre mani quanto un proiettore, o un convenzionale schermo di computer, produce per i nostri occhi? La scienza e la tecnologia delle interfacce aptiche (dal greco “toccare”) si dedicano proprio allo studio e alla creazione di immagini per mani. Le interfacce aptiche sono macchine che permettono di generare stimoli tattili, di toccare, sentire, manipolare, alterare e creare oggetti virtuali.
Esistono oggi alcuni modelli commerciali, quali il Phantom della Sensable Inc. (vedi figura), che hanno raggiunto una certa diffusione nel mercato delle applicazioni al progetto meccanico assistito da computer, ai videogiochi, alla scultura digitale e all’addestramento di medici e odontoiatri.
L’operatore interagisce con interfacce quali il Phantom impugnando uno stilo o un analogo strumento, che è collegato a un’estremità a un meccanismo e che è rappresentato nella realtà virtuale da un’immagine grafica, o avatar.
Una rappresentazione grafica dell'interfaccia aptica ideale.
Muovendo l’avatar l’utente può esercitare forze sugli oggetti dell’ambiente virtuale e può sentirne le reazioni attraverso lo strumento impugnato.
Dispositivi di questo genere possono avere aspetti anche molto diversi - in alcuni casi ad esempio il meccanismo che produce forze può essere fissato sul braccio o sulla spalla dell’operatore, come in un esoscheletro - ma condividono la caratteristica di produrre unicamente stimoli “cinestetici” che investono la percezione della posizione dell’articolazione e delle forze dei muscoli del braccio o della mano dell’operatore.
La percezione aptica nell’uomo è, per il vero, assai più ricca della sola cinestesia, e comprende le importanti funzioni delle terminazioni nervose e dei recettori della pelle che raccolgono gli stimoli tattili.
Nonostante i numerosi avanzamenti tecnologici nel campo delle interfacce aptiche degli anni recenti, il traguardo dello sviluppo di display tattili pienamente funzionali e convincenti non è ancora raggiunto.
Una delle maggiori mancanze riguarda la difficoltà di costruire dispositivi che possano stimolare la pelle con una sufficiente risoluzione spaziale e temporale, ma che al contempo siano abbastanza poco intrusivi da non disturbare la percezione generando straniamento.
Per superare questi limiti, è necessario ancora molto lavoro di ricerca non solo nell’innovazione tecnologica, ma anche nella comprensione dei meccanismi psicofisici della percezione aptica nell’uomo.
Da un lato, infatti, nuove tecnologie di progetto, nuovi materiali e nuove tecniche di controllo sono indispensabili per aumentare la risoluzione e la fedeltà dei dispositivi attuali; dall’altro, ancora molto rimane da capire su come il tatto funziona. In queste direzioni si stanno muovendo molti gruppi di ricerca, tra cui il TouchLab dell’Università di Pisa. Qui è stata studiata ad esempio la possibilità di sostituire la stimolazione meccanica della cute del polpastrello, di difficile realizzazione pratica, con una stimolazione elettrica degli stessi recettori, che realizza non invasivamente sensazioni analoghe.
Mediante l’utilizzo di materiali “intelligenti”, quali i fluidi magnetoreologici, è stata poi sviluppata una nuova classe di dispositivi aptici detti “a scatola nera”, che cercano di realizzare il concetto ideale di display aptico - una sorta di “TV del tatto” - uno spazio in cui l’operatore possa inserire e muovere liberamente la mano, interagendo con oggetti che vi si materializzano e possono essere manipolati, replicando l’ambiente virtuale di cui si vuole avere esperienza.
Pur se questo è ancora un traguardo lontano, il dispositivo illustrato nella figura in alto ha dato risultati incoraggianti. Esso consiste in una camera cilindrica, riempita di fluido magnetoreologico, e in una serie di bobine poste attorno alla camera, che creano campi magnetici controllati dal computer in modo da rendere più o meno solido il fluido in parti diverse della camera. L’operatore pone la sua mano direttamente nella camera, potendo così toccare le forme create dal computer.

Una Haptic Black Box del Touch Lab
Data la complessità dei fenomeni meccanici e fisiologici che sottendono la percezione tattile, tuttavia, appare realisticamente impossibile realizzare copie esatte degli stimoli che la nostra mano riceve nell’esplorazione e manipolazione del mondo esterno. Per questo motivo la ricerca si rivolge anche con molta attenzione a cercare di capire più in profondità i meccanismi percettivi tattili e la loro elaborazione. Oltre all’interesse scientifico di un’indagine in un territorio ancora poco esplorato come quello del tatto, queste ricerche si propongono anche di capire quali sono i limiti della percezione tattile allo scopo di poterli sfruttare, per creare stimoli che, per quanto imperfetti, siano comunque sufficienti a “raggirare” le nostre capacità e aumentare la nostra disposizione a immaginare.
Un ruolo particolarmente importante in questo senso è giocato dallo studio delle illusioni percettive. Lo studio delle illusioni, in particolare di quelle ottiche, è da sempre un caposaldo delle tecniche d’indagine psicofisica dei sensi.
Le illusioni sono spesso legate ai meccanismi profondi del canale percettivo considerato, e ne rivelano molti aspetti, sia dal punto di vista psicofisico che neurofisiologico.
Alcune delle illusioni ottiche più note sono state usate a motivazione e a conferma del valore predittivo dei modelli matematici prodotti dalla neuroscienza computazionale per la percezione visiva.
Ad esempio, il modello matematico del “flusso” ottico - cioè dei fenomeni dinamici legati alle variazioni nel tempo della immagine sulla retina - permette di descrivere una serie di illusioni ottiche tra cui quella cosiddetta del barber pole. Esiste un analogo concetto di flusso per un senso tanto dinamico quanto il tatto?
Le prime risposte fornite dal TouchLab sono affermative: sulla base di un nuovo modello matematico della percezione tattile dinamica, sono state fatte previsioni sugli esiti illusori di opportuni stimoli, e queste sono state confermate da test psicofisici condotti mediante interfacce aptiche appositamente costruite.
Inoltre, l’equipe di Pietro Pietrini, uno dei fondatori del TouchLab, ha fatto vedere con uno studio di risonanza magnetica funzionale recentemente apparso su “Cerebral Cortex”, che alcune delle regioni nella corteccia coinvolte nel processare le informazioni contenute nel flusso ottico, lo sono anche per quello tattile - dando luogo all’ipotesi che esista una organizzazione supramodale dei processi cerebrali legati al flusso percettivo, in qualche misura comune a diversi canali sensoriali.
Tra le applicazioni di quanto trovato sul flusso tattile, una riguarda la realizzazione di interfacce aptiche cutanee di realizzazione semplice ma di grande efficacia.
Il problema affrontato in questo caso è quello di fornire alle dita le sensazioni che permettono di distinguere la consistenza dell’oggetto toccato virtualmente come, ad esempio, per permettere a un chirurgo che operi remotamente, o che si addestri in un ambiente virtuale, di distinguere al tatto un nodulo polmonare dal tessuto che lo circonda.

Un display aptico di tipo CASR per un singolo polpastrello
Il principio usato in queste interfacce è quello di replicare non tutti i dettagli della deformazione del polpastrello quando preme contro differenti oggetti, ma solo la diversa rapidità con la quale la superficie di contatto tra l’oggetto e il polpastrello medesimo si espande all’aumentare della forza di pressione. Questa cosiddetta Contact Area Spread Rate (CASR) è direttamente legata alla cedevolezza: se l’oggetto toccato è molto cedevole, l’area di contatto si allarga rapidamente e va quasi ad abbracciare la forma del polpastrello.
L’interfaccia aptica mostrata in figura può modificare a piacere questa velocità d’espansione dell’area di contatto, e dare quindi al chirurgo la sensazione della diversa consistenza dei tessuti che deve incidere. Anche in questo caso, la validità di questa tecnologia è stata verificata con una serie d’esperimenti psicofisici su soggetti volontari, che hanno dato ottimi risultati, mostrando che il display di CASR migliora fortemente la percezione aptica della cedevolezza rispetto ai convenzionali dispositivi puramente cinestetici.
Anche nel caso dell’effetto CASR esiste un’analogia con la percezione visiva, in particolare con la capacità degli animali superiori di stimare la velocità d’avvicinamento a un oggetto sulla base della velocità con la quale aumenta l’area della sua immagine sulla retina.
Per esempio, quando guidiamo, è osservando quanto velocemente s’ingrandisce la sagoma posteriore dell’auto davanti a noi che stimiamo (in una brevissima frazione di secondo) quanto ci stiamo avvicinando e il tempo che ci resta a disposizione per frenare.
Entrambi i fenomeni sembrano essere spiegati dai modelli di percezione dinamica in termini molto semplici: per il teorema di Gauss, infatti, l’integrale della divergenza del flusso eguaglia la velocità di variazione della superficie. In conclusione, dalle esperienze fatte appare che il flusso tattile sia coinvolto nel processo di acquisizione d’informazioni su movimento, forma e cedevolezza degli oggetti che tocchiamo, informazioni che sono fortemente legate al carattere attivo e dinamico della esplorazione tattile.

Una interfaccia aptica commerciale: il Phantom della Sensable Inc.
Tornando a considerare il tema più generale delle funzioni cognitive superiori legate al tatto, e al titolo di questo intervento - ispirato da un bel convegno organizzato di recente da Antonietta Sanna - non possiamo non accennare a come, osservando la meravigliosa architettura della mano umana, essa ci appaia essere ancora assai più importante che, come dicevamo, l’organo del tatto.
La mano è lo strumento principe con il quale modifichiamo il mondo che ci circonda, costruiamo gli strumenti per i nostri bisogni e creiamo le espressioni del nostro senso estetico, la nostra Arte.
La Mano come organo della creazione che distingue l’uomo dagli animali, e la sua dualità con le facoltà cognitive astratte del cervello, è un tema antico, che attraversa il pensiero occidentale da Anassagora (che sosteneva che l’uomo è divenuto il più intelligente degli animali perché dotato di mani), a Giordano Bruno, all’uomo come the tool-making animal di Beniamino Franklin (e Karl Marx), a l’homo faber di Bergson.
Le prospettive che si apriranno quando sapremo dare alla mano quanto già sappiamo offrire alle nostre orecchie e alla nostra vista ancora non ci sono chiare del tutto, ma sono sicuramente piene di fascino.
Antonio Bicchi
direttore del Centro interdipartimentale
di ricerca "Enrico Piaggio"
bicchi@ing.unipi.it
Bibliografia
- J. J. Gibson, The Senses Considered as Perceptual Systems, Houghton Mifflin, Bos-ton, 1966.
- Bicchi, A., Scilingo, E. P. & De Rossi, D., Haptic Discrimination of Softness in Teleoperation: The Role of the Contact Area Spread Rate. IEEE Trans. Robotics & Automation 16, 496-504 (2000).
- Pietrini, P. et al., Beyond sensory images: Object-based representation in the human ventral pathway, Proc Natl Acad Sci USA 101, 5658-63 (2004).
- E. Ricciardi , N. Vanello, L. Sani, C. Gentili, E. P. Scilingo, L. Landini, M. Guazzelli, A. Bicchi, J. V. Haxby, P. Pietrini, The Effect of Visual Experience on the Development of Functional Architecture in hMT+, Cerebral Cortex, Oxford University Press (2007).
- V. Hartwig, L. Landini et al., A Compatible Electrocutaneous Display for functional Magnetic Resonance Imaging application, Proc.28th IEEE Engineering in Medicine and Biology Conference (2006).
- R. Rizzo, N. Sgambelluri, E. P. Scilingo, M. Raugi, A. Bicchi, Electromagnetic Modeling and Design of Haptic Interfaces Prototypes based on MagnetoRheological Fluids, IEEE Transactions on Magnetics , 2007.
- D. De Rossi, E. P. Scilingo, Skin’Like Sensor Arrays, Encyclopedia of Sensors, American Scientific Publishers, vol. 9, pp. 535-556, 2006.